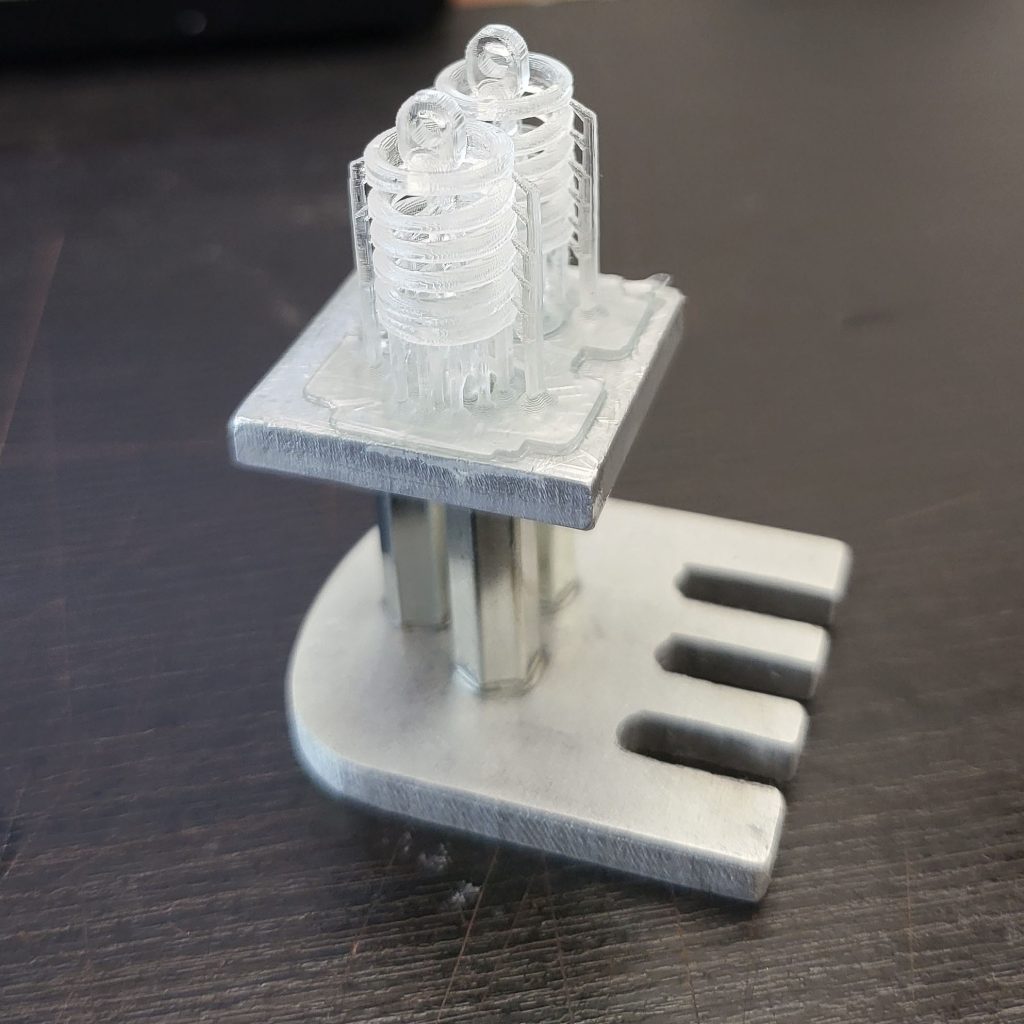
At first, we designed and printed two simple Springs, cleaned and post-cured them. Thickness was about 2mm. The PicoFab small minimum printing volume (10-20ml) is perfect to test expensive or exotic resin, like this one.
The spring, mounted on a support, was connected to a small weight and heated to about 40°C. Then the weight has been removed. On the video, you can see that by heating again to 40-50°C, the springs goes back to the original shape. It works!
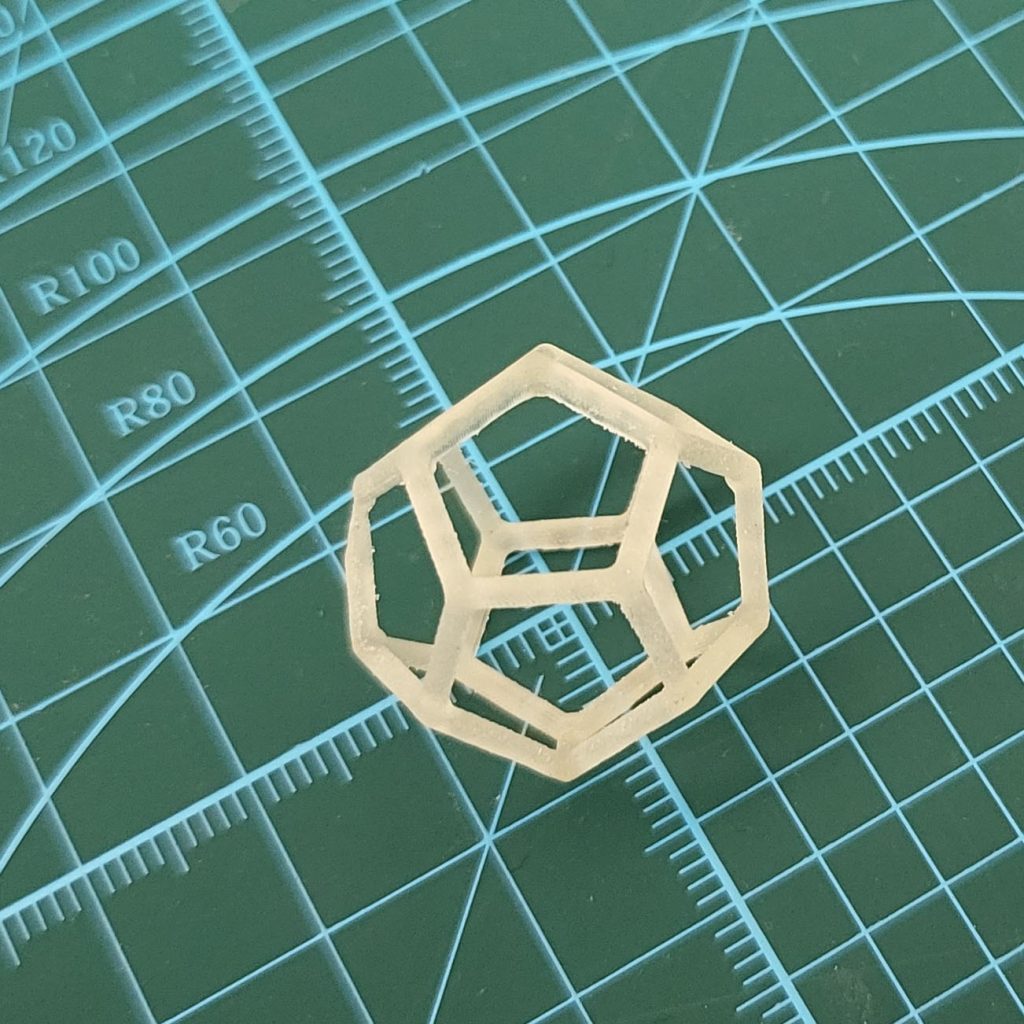
Now let’s test some “4D Printing”: a 3D Printed dodechaedron. After printing, the idea is to make it flat while heating, and see if it can go back to shape when heated again.
3D Printed and post processed, so far so good…
Unfortunately, the shape was quite fragile, so it broke into pieces while trying to be flattened out during heating. Still, this piece shows the ability to go back to the original shape.
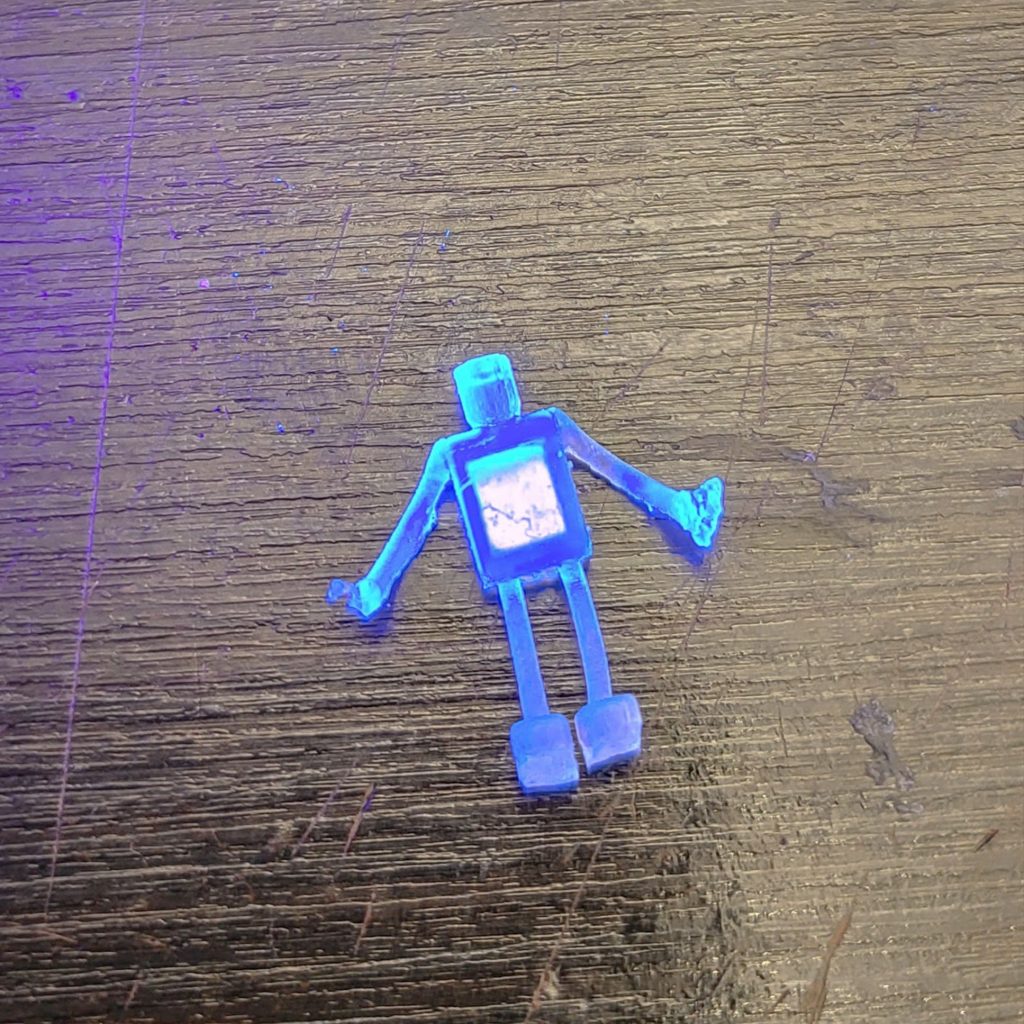
Playing with the next idea. I designed a simple 3D Printed robot, with a magnet put inside. The idea is to use the magnet to move the robot around, and use the memory-shape properties to “squish” the robot when it has to move into narrow passages.
Robot takeover is one step closer!
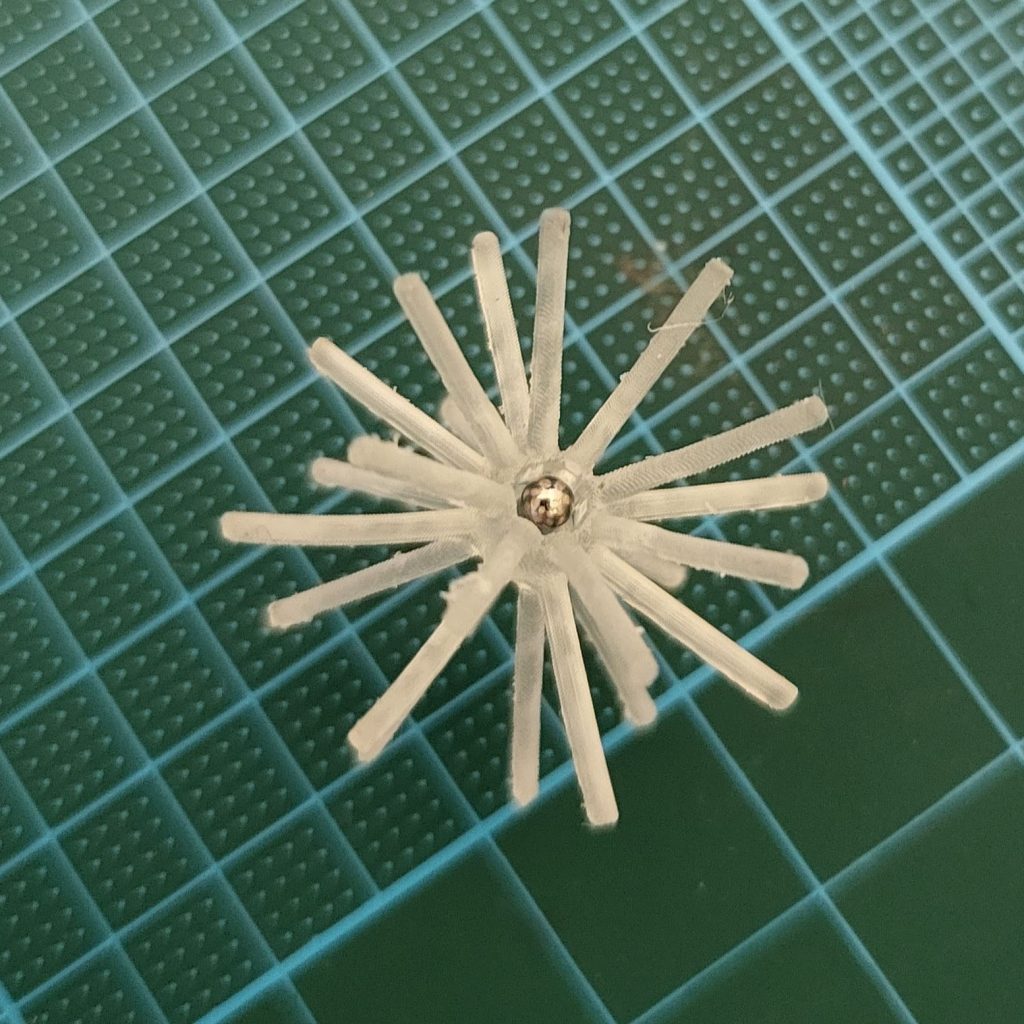
The last experiment is a (less humanoid) tiny robot. A magnetic sphere is put inside. The printing times with the PicoFab (8-900 µW/cm2) are 50s (first layers) , then 11s @ 50.8um
An external magnet can move the robot around.
After heating to 40-50°C, the robot becomes soft and can squished into narrow passages.
After the robot is out of the narrow passage, applying heat, it can reverse to the original, 3D Printed shape.